Does minimalism have a place in research
Minimalism is a growing trend in life and work — but can researchers benefit from the approach of “less is more”? We asked two early-career researchers recently and was surprised by what they had to say.

Votre navigateur n’est malheureusement pas entièrement pris en charge. Si vous avez la possibilité de le faire, veuillez passer à une version plus récente ou utiliser Mozilla Firefox, Microsoft Edge, Google Chrome, ou Safari 14 ou plus récent. Si vous n’y parvenez pas et que vous avez besoin d’aide, veuillez nous faire part de vos commentaires.
Nous vous serions reconnaissants de nous faire part de vos commentaires sur cette nouvelle expérience.Faites-nous part de votre opinion(S’ouvre dans une nouvelle fenêtre)
Actualités, informations et dossiers pour les communautés de la recherche, de la santé et de la technologie.

Minimalism is a growing trend in life and work — but can researchers benefit from the approach of “less is more”? We asked two early-career researchers recently and was surprised by what they had to say.
Découvrez comment les dirigeants de bibliothèques finalisent les termes d'un accord et garantissent la mise en œuvre réussie d'un accord de transformation qui soutient leurs objectifs stratégiques.

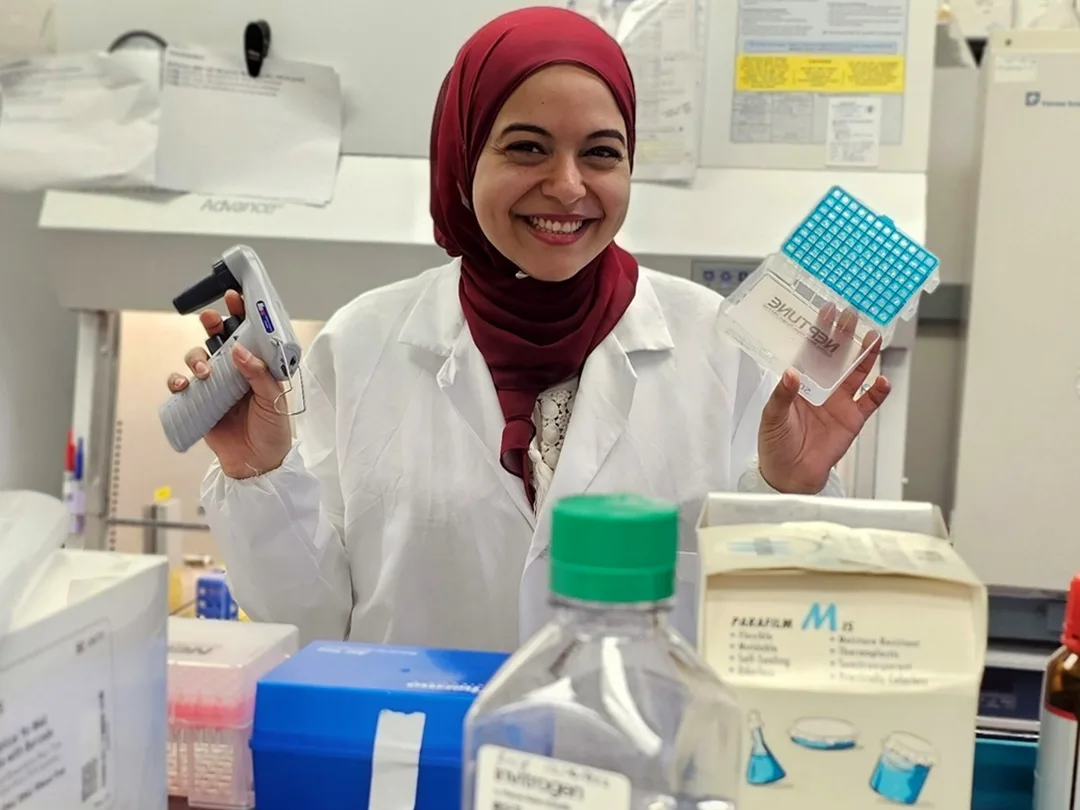
Le Dr Engie El Sawaf sait à quel point la recherche peut changer la vie des gens. Elle étudie la neuropathie, un effet secondaire courant de la chimiothérapie qui peut être si grave que les patients décident d'arrêter le traitement du cancer. Découvrez comment ScopusAI lui fournit les informations fiables dont elle a besoin.