Posture et équilibre : deux notions différentes
France | 18 décembre 2017
Découvrez l’introduction de l’ouvrage La posture debout(S’ouvre dans une nouvelle fenêtre)
Qu’est-ce qu’une posture ?
Une posture est définie par une position particulière des segments corporels les uns par rapport aux autres à un instant donné [1, 2]. Il existe un grand nombre de postures pouvant être adoptées par un être humain. Parmi elles, la station debout érigée constitue la posture de référence et son maintien sur terre doit s’opposer à l’action de la force de pesanteur (résultante de la somme algébrique entre la force de gravité qui plaque au sol et la force centrifuge, liée à la rotation de la Terre, qui tend à l’en soustraire).
La posture debout
La posture dépend d’un programme moteur (ensemble des processus neurophysiologiques responsables d’une activité motrice élaborée par le système nerveux de manière héréditaire ou acquise). Elle est le support de deux fonctions : le premier est une fonction antigravitaire consistant à s’opposer à l’action des forces gravitaires, le second est une fonction de relation avec le monde extérieur [1]. Cette fonction utilise les informations issues de récepteurs spécialisés pour connaître la position du corps dans l’espace ainsi que l’orientation des segments corporels. Ces informations sont fournies par différents récepteurs : oculaires [3, 4], vestibulaires [5], proprioceptifs musculaires [3, 6, 7] et articulaires [8] et par des récepteurs plantaires situés à l’interface homme/environnement [9], parmi lesquels les récepteurs proprioceptifs jouent un rôle majeur. La posture érigée sert de référence consciente ou non (schéma corporel) pour le maintien postural comme pour le changement de posture et/ou l’exécution d’une activité motrice [1, 10].
Conditions du maintien de la posture
D’un point de vue mécanique, trois conditions doivent être réunies pour tenir une posture sur terre : 1. reconnaître la verticale gravitaire (oreille interne) et, ainsi, la direction des forces exercées par l’attraction terrestre ; 2. stabiliser le centre de gravité de l’ensemble du corps (appliqué au centre de masse) ou le maintenir placé au dessus de la base d’appui (à la verticale de la base d’appui) ; 3. disposer d’un polygone de sustentation ou base d’appui (indépendamment de la disposition des segments corporels les uns par rapport aux autres).
D’un point de vue physiologique, trois conditions doivent pouvoir être assurées : 1. pouvoir reconnaître la verticale en rapport avec la fonction de l’oreille interne ; 2. pouvoir stabiliser chaque segment à un instant donné (appui, forces de maintien) et composer la stabilité de l’ensemble (afférences et réafférences sensorielles multiples) ; 3. disposer des appuis suffisamment stables et rigides pour contrôler (équilibrer) les forces en présence (forces intérieures et extérieures).
Pour conserver l’équilibre, suivant les circonstances, la posture doit : 1. organiser le placement des masses segmentaires pour que l’ensemble, représenté par le centre de gravité général (G) du corps, soit placé à la verticale de la zone d’appui ; 2. le degré de stabilité de l’équilibre dépend notamment de la distance entre la verticale abaissée du G et les limites du polygone de sustentation ; ce qui impose de placer les appuis dans la direction et le sens prévisible d’un déséquilibre ; 3. s’adapter aux modifications de la posture avec deux possibilités : le déplacement d’un, voire de tous les segments corporels, modifiant la situation spatiale du G sans changer les appuis au sol, le changement des points d’appuis qui modifient le polygone de sustentation et sa figure géométrique.
Chez l’homme, un grand nombre des activités de la vie quotidienne utilise la position debout tout comme la station assise. Le succès de toutes ces activités dépend en premier lieu de la capacité à tenir ces positions et à en contrôler l’équilibre et les déséquilibres. Par exemple, lorsque l’on veut lever les bras à partir de la position debout, il faut tout d’abord stabiliser les appuis et réaligner les segments en relation avec le mouvement par des ajustements anticipateurs [11].
Remarque
Ce phénomène reste vrai chez le paraplégique pour qui le contrôle de la position assise devient le facteur déterminant des capacités des membres supérieurs. Pour pouvoir lever les bras suivant son niveau lésionnel, il peut se retrouver en situation d’incapacité fonctionnelle alors que ses membres supérieurs ne souffrent d’aucun déficit. Cette incapacité à lever les bras résulte de l’impossibilité à stabiliser ses appuis [12]. Ce fait a permis de mettre en place un test d’évaluation fonctionnelle en rapport avec le niveau d’atteinte [13]. Le maintien de l’équilibre de la position comme son contrôle sont aussi nécessaires pour pouvoir se déplacer en marchant (contrôle du déséquilibre créé volontairement à partir de la position debout pour initier la marche [14] comme celui créé sur le tronc par l’application des forces nécessaires aux déplacements des membres supérieurs et inférieurs [11]).
Qu’est-ce que l’équilibre ?
Pour les mathématiciens, l’équilibre dépend de deux conditions et de la résolution de deux équations : la première est que la somme des forces soit égale à zéro (ΣF = 0), ce qui signifie qu’il n’y a pas de mouvement de translation ; et la seconde est que la somme des moments doit être égale à zéro (ΣMt Fext = 0), ce qui signifie qu’il n’y a pas de mouvement de rotation. La notion d’équilibre postural renvoie au maintien en équilibre d’une position particulière des segments corporels ou de l’ensemble du corps, c’est-à-dire d’une posture. Sur terre, le corps est soumis à l’action de forces externes (pesanteur ou poids segmentaire, poids du corps, charge extérieure surajoutée, réaction d’appui…) et le maintien de l’équilibre sous-entend : 1. que les lois de la mécanique qui définissent l’équilibre soient respectées, c’est-à-dire que la somme des forces et que la somme des moments soient égales à zéro ; 2. que les processus neurophysiologiques qui règlent l’activité des forces musculaires s’opposant à la résultante d’action des forces externes agissant sur le corps puissent s’adapter aux modifications de ces forces. Le maintien postural a donc un aspect fortement dynamique dépendant d’une activité neuromusculaire adaptée.
Équilibre de la posture debout immobile non perturbée
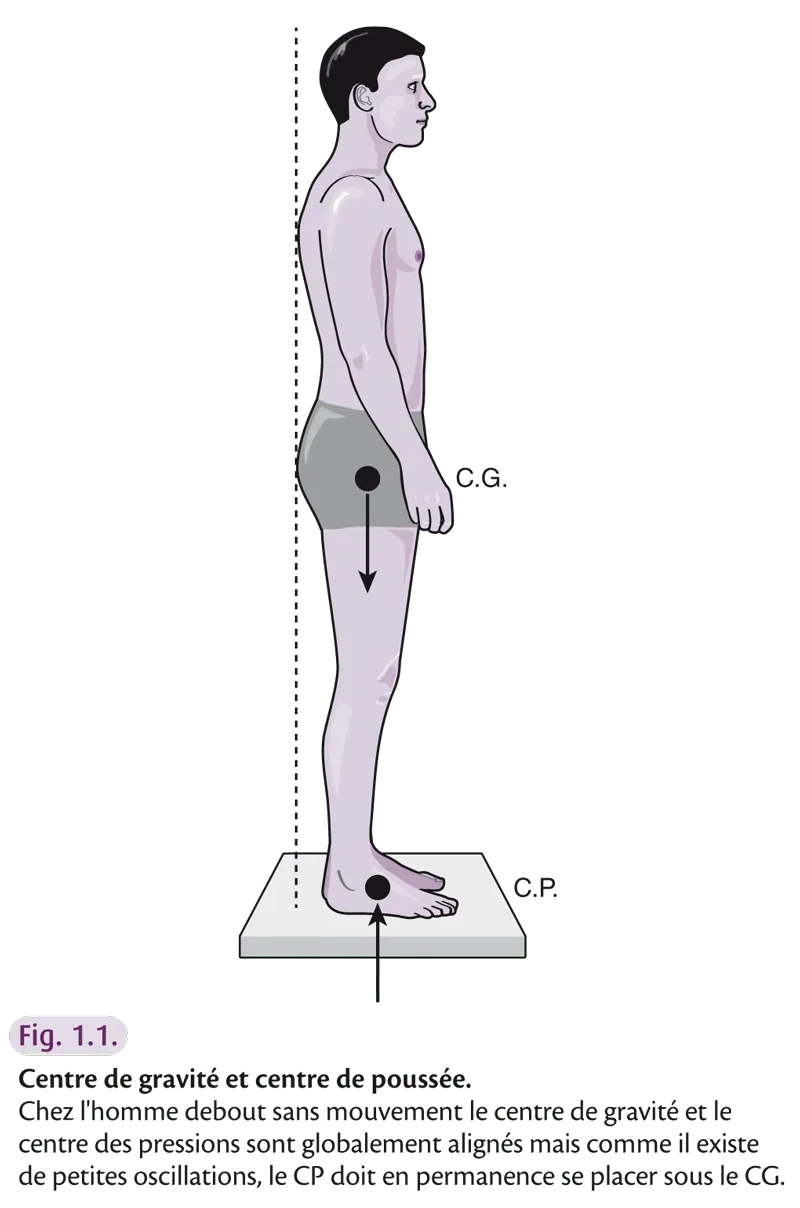
Pour comprendre l’équilibre de la posture debout, le corps, considéré dans son ensemble, est assimilé à un solide rigide. Dans ce cas, il n’est soumis qu’aux actions de la force gravitaire, appliquée au centre de gravité (CG) et de la réaction des appuis au sol, appliquée au centre des pressions (CP). Dans un tel cas, l’équilibre est obtenu lorsque le centre de gravité du corps se projette dans son polygone de sustentation. C’est-à-dire lorsque le CG est situé au-dessus de la surface d’appui déterminée par la figure géométrique joignant la projection au sol des points d’appui les plus externes représentés par les deux pieds. Alors, le poids du corps est équilibré par la résultante des forces de réaction du sol appliquée au centre des pressions (figure 1.1).
Cependant, les segments constituant le corps humain sont reliés entre eux par des articulations et sont ainsi mobiles les uns par rapport aux autres. Chaque segment possède un centre de gravité segmentaire, point d’équilibre du segment, auquel est appliqué son propre poids. En position debout, ces segments sont empilés les uns sur les autres dans une position proche de la verticale. Chaque surface d’appui supporte un ensemble de segments dont le centre de gravité ou barycentre (somme des CG segmentaires) est situé plus haut en équilibre instable. De ce fait, l’équilibre des segments corporels les uns sur les autres dépend de la situation du centre de gravité correspondant, par rapport à sa surface d’appui et des forces qui en contrôlent la position. Chaque segment est en équilibre sur la surface articulaire qui le supporte et retentit sur l’équilibre du segment sousjacent. Il s’ensuit, qu’à chaque étage, l’équilibre est différent du fait de la masse à supporter qui augmente à chaque niveau pris du haut vers le bas, de la forme anatomique de la surface articulaire qui sert de support et des forces de maintien segmentaires. L’équilibre de l’ensemble du corps sur les pieds dépend de celui de chacun des étages sus-jacents. En position debout, les centres de gravité des segments corporels ne sont en général pas alignés sur leur support [15, 16]. De ce fait, le moment des centres de gravité segmentaires, considéré par rapport au centre de l’articulation sous-jacente servant d’appui, n’est pas nul.
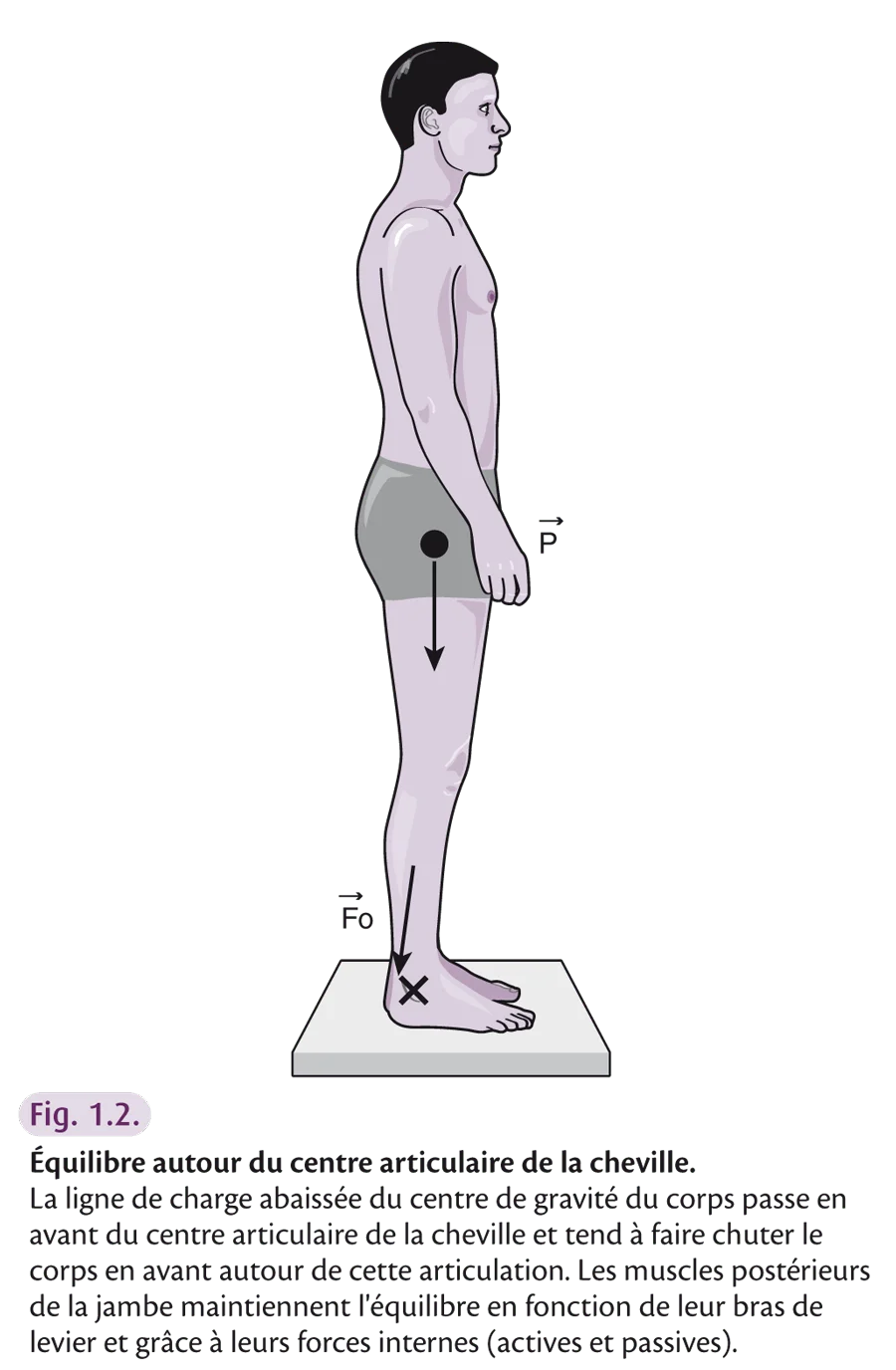
L’intervention de forces internes au corps humain est donc une autre condition nécessaire au maintien de l’équilibre des segments corporels les uns par rapport aux autres [17]. Les forces internes sont nécessaires pour s’opposer aux forces gravitaires qui tendent à faire chuter les segments sus-jacents par rapport aux segments sous-jacents. En position debout, la tête est en équilibre sur le cou, l’ensemble tête et cou l’est sur la colonne thoracique, la colonne thoracique sur la colonne lombale (lombo-pelvienne) et, ensuite, la ceinture pelvienne et le tronc sont en équilibre sur les articulations coxo-fémorales, celles-ci le sont sur les genoux et l’ensemble du corps est en équilibre sur les chevilles et les pieds. Le maintien de l’équilibre du corps par rapport aux chevilles dans le plan sagittal est un exemple de la nécessité de l’action de forces internes pour ne pas chuter en avant [18] (figure 1.2).
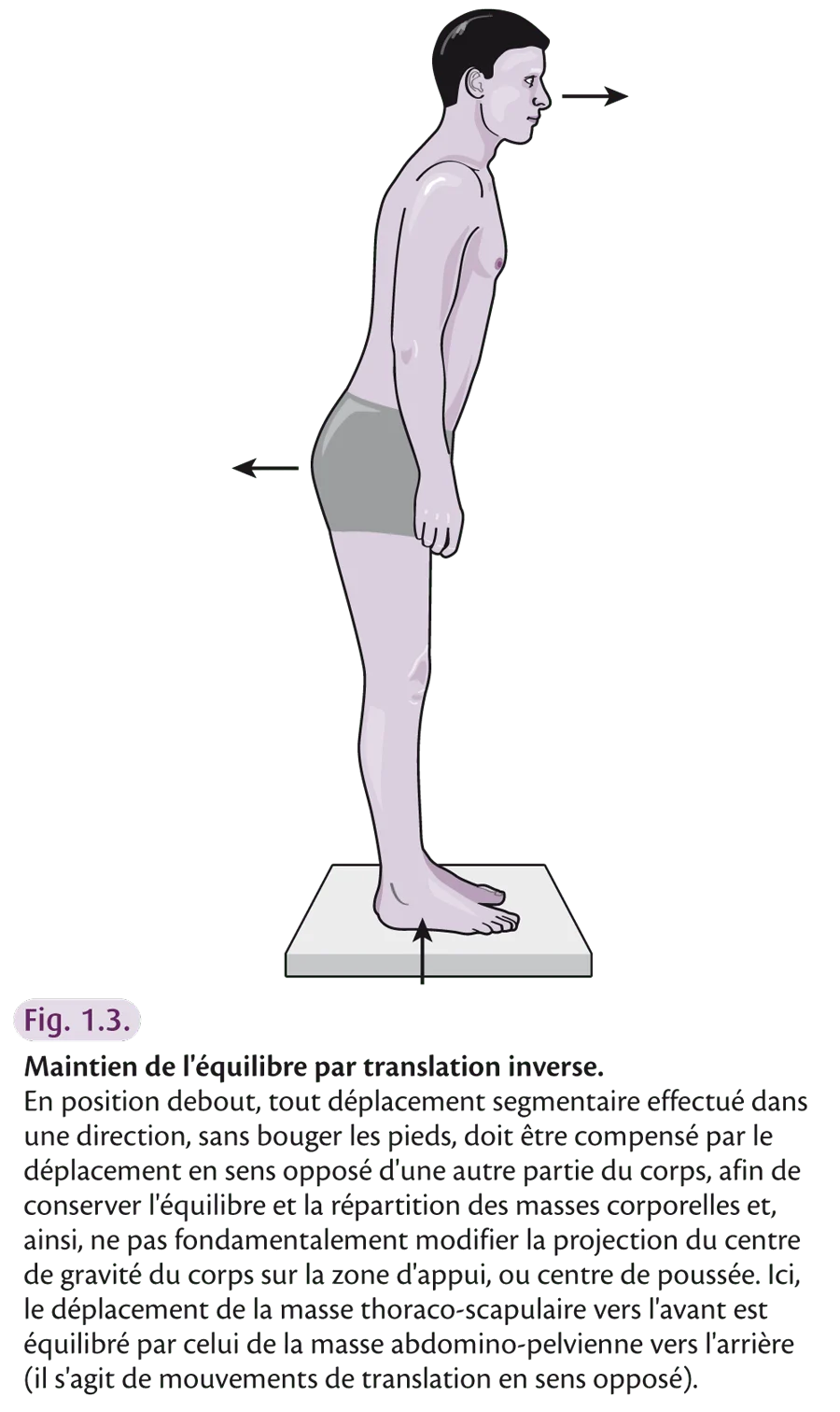
Le maintien de l’équilibre debout, lors du changement des positions segmentaires sans modification de la base d’appui, fait appel aux processus de translations. Dans ce cas, l’équilibration des forces en présence est assurée par un déplacement segmentaire en sens opposé dans le plan horizontal. Habituellement, les masses thoraco-scapulaire et abdomino-pelvienne s’équilibrent dans le plan sagittal. Ainsi, pour se pencher en avant, les épaules avancent, la ceinture pelvienne recule. Aux membres inférieurs, les hanches fléchissent, les genoux restent en rectitude et les segments jambiers alignés sur la cuisse placent ainsi les chevilles en extension (flexion plantaire) (figure 1.3). Le déplacement de la partie haute du corps vers l’avant et celui de sa partie basse vers l’arrière permettent de garder la projection du CG dans la base d’appui et ainsi de conserver l’équilibre et d’éviter la chute. Cette synergie, initiée volontairement pour se pencher en avant, correspond également à une stratégie d’équilibration en réaction à la bascule du plan d’appui au sol [19].
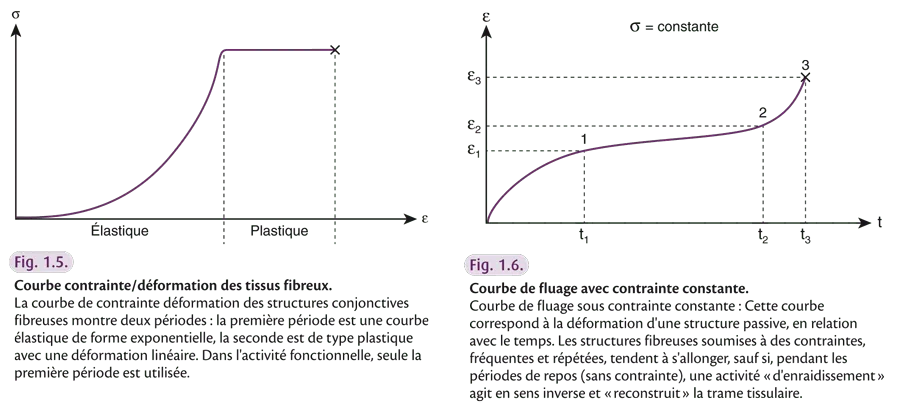
Cette « loi » du maintien de l’équilibre de la position debout est aussi illustrée lors des changements d’appui dans le plan frontal. Par exemple, lors du passage de la position debout en appui sur les deux pieds à celle de l’appui sur un seul pied, la translation horizontale de la ligne de charge de l’ensemble du corps vers le pied d’appui est un préalable obligé. Il s’agit, dans ce cas, de translater la projection du CG sur la zone d’appui pour conserver l’équilibre. Lorsque cette translation ne peut être effectuée, il devient impossible de lever un pied sans perdre l’équilibre. Cette translation a aussi pour effet de libérer le pied préalablement en charge au sol pour qu’il puisse s’élever comme lors de l’initiation de la marche [14]. ● Les forces internes (figure 1.4) au corps humain sont représentées par des forces actives et des forces passives. Les forces actives sont les forces musculaires contractiles et réactives (système nerveux) alors que les forces passives ne sont pas réactives mais résistantes à l’étirement et avec un comportement viscoélastique : – les forces actives sont en rapport avec la contraction musculaire et la formation de ponts actine myosine au sein de l’ultrastructure musculaire qu’est le sarcomère sous l’impulsion du système nerveux lorsqu’une unité motrice se contracte. Ces forces sont coûteuses en énergie (ATP) et sous contrôle du système nerveux central. Une posture maintenue de façon prolongée ne peut compter sur la seule force active au risque de fatiguer. La posture se doit d’être économe et d’utiliser des forces passives ; – les forces passives proviennent de l’allongement du tissu conjonctif fibreux par une force extérieure. Celui-ci prend des formes diverses (en épaisseur, densité, forme et longueur) représentées par le squelette fibreux des structures musculaires et leurs tendons, les cloisons intra et intermusculaires ou fascias, les aponévroses de recouvrement (fascia), les structures articulaires capsulaires et ligamentaires. Ce sont des forces passives non coûteuses en énergie et résultant de la résistance opposée par les structures fibreuses à l’étirement. Ces forces passives sont d’autant plus importantes que la structure étirée s’allonge et qu’elle se rapproche de sa course externe. Une posture maintenue de façon prolongée dans le temps présente des inconvénients pour ces structures fibreuses qui sont exposées au risque de fluage lorsqu’elles sont soumises à des contraintes qui se prolongent dans le temps (figures 1.5 et 1.6). D’autre part, la présence de fatigue musculaire rend l’équilibre postural moins stable [20–22].
● Les forces internes (figure 1.4) au corps humain sont représentées par des forces actives et des forces passives. Les forces actives sont les forces musculaires contractiles et réactives (système nerveux) alors que les forces passives ne sont pas réactives mais résistantes à l’étirement et avec un comportement viscoélastique : – les forces actives sont en rapport avec la contraction musculaire et la formation de ponts actine myosine au sein de l’ultrastructure musculaire qu’est le sarcomère sous l’impulsion du système nerveux lorsqu’une unité motrice se contracte. Ces forces sont coûteuses en énergie (ATP) et sous contrôle du système nerveux central. Une posture maintenue de façon prolongée ne peut compter sur la seule force active au risque de fatiguer. La posture se doit d’être économe et d’utiliser des forces passives ;
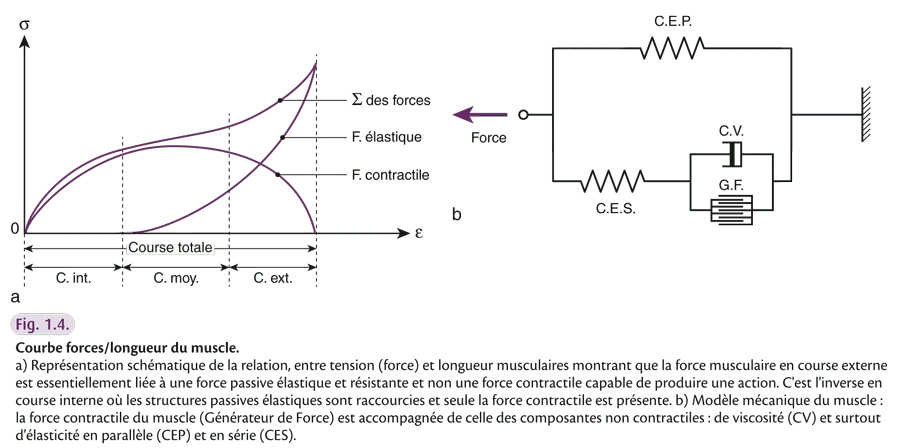
– les forces passives proviennent de l’allongement du tissu conjonctif fibreux par une force extérieure. Celui-ci prend des formes diverses (en épaisseur, densité, forme et longueur) représentées par le squelette fibreux des structures musculaires et leurs tendons, les cloisons intra et intermusculaires ou fascias, les aponévroses de recouvrement (fascia), les structures articulaires capsulaires et ligamentaires. Ce sont des forces passives non coûteuses en énergie et résultant de la résistance opposée par les structures fibreuses à l’étirement. Ces forces passives sont d’autant plus importantes que la structure étirée s’allonge et qu’elle se rapproche de sa course externe. Une posture maintenue de façon prolongée dans le temps présente des inconvénients pour ces structures fibreuses qui sont exposées au risque de fluage lorsqu’elles sont soumises à des contraintes qui se prolongent dans le temps (figures 1.5 et 1.6). D’autre part, la présence de fatigue musculaire rend l’équilibre postural moins stable [20–22].
Avec le temps, l’ensemble des forces internes du maintien postural fatigue sous l’effet de la contrainte. Les structures actives s’épuisent et les structures passives se déforment. Ce qui impose de changer de position pour modifier finement les lignes d’appuis et les réactions des forces internes, actives et passives. Ces changements sont imperceptibles à l’oeil nu mais peuvent être mis en évidence avec les outils de laboratoire (plateforme de force, analyse cinématique, électromyogramme). L’inertie des segments corporels et de l’ensemble du corps représente un autre type de force passive qui n’intervient que lorsqu’il y a mouvement. L’équation du mouvement de translation s’écrit F = mγ et celle du mouvement de rotation s’écrit ΣMt Fext = Iθ”. L’inertie corporelle correspond à la masse du corps ou à celle des segments corporels pour les mouvements de translation et au moment d’inertie (I miri2) pour les mouvements de rotation. Suivant les circonstances et suivant le plan considéré (horizontal ou vertical), l’inertie corporelle ou l’inertie segmentaire est susceptible de s’opposer au mouvement ou au contraire d’en favoriser la dynamique. Par exemple, la masse des segments corporels s’oppose au mouvement segmentaire en translation réalisé dans un plan horizontal ou de bas en haut. À l’inverse, elle favorise le mouvement lorsqu’il est effectué de haut en bas. Il en est de même pour le moment d’inertie et le mouvement de rotation. L’activité musculaire est sous la dépendance du système nerveux central et périphérique. Le tonus musculaire de posture et la réactivité musculaire dépendent notamment des informations sensorielles (proprioceptives, visuelles et cutanées…). En particulier, l’innervation sensitive des structures musculaires [3] et ligamentaires [23, 24], comme celle des récepteurs plantaires [9, 10], informe sur les modifications de longueur et de tension musculaires, de position articulaire et de pression exercée sur la plante des pieds. Ces informations sont à l’origine du contrôle sensorimoteur de la posture [6]. La stabilité et la mobilité de chacun des segments du corps, comme de l’ensemble, doivent être contrôlées, le maintien de l’équilibre en dépend (maintien statique d’un segment ou stabilité posturale de l’ensemble, ou à l’inverse, stabilité dynamique de toute ou partie du corps). En conclusion, le maintien de l’équilibre de l’ensemble du corps correspond à celui d’une véritable chaîne posturale [3].
Posture debout et forces externes
La position du centre de gravité de l’ensemble du corps en posture debout érigée a été étudiée cliniquement par différents auteurs [15, 16, 25, 26]. Il est admis que le centre de gravité se situe au niveau de la ceinture pelvienne un peu en avant de la deuxième vertèbre sacrée (morphologiquement, vue de face à environ deux à trois travers de doigts en dessous de l’ombilic). La ligne de gravité du corps dans son ensemble correspond à la verticale passant par le CG du corps humain ou barycentre des masses de tous les segments qui le constituent. En position debout, dans le plan sagittal, la ligne de gravité passe en arrière de la hanche, à peu près à l’aplomb de l’axe du genou et en avant du centre des articulations des deux chevilles, tendant à faire chuter le corps vers l’avant. L’action des forces de maintien antigravitaire met en jeu, essentiellement, les muscles du plan postérieur ou bien celle des structures fibreuses. Cette activité musculaire est relativement faible en position debout [27]. Tout changement de position d’un ou plusieurs segments corporels (déséquilibre « intrinsèque ») se traduit par la modification des forces nécessaires pour conserver l’équilibre. Il en est de même lorsque l’action d’une force extérieure (déséquilibre « extrinsèque » : charge à porter, action extérieure déséquilibrante) s’ajoute au poids du corps. Dans tous les cas, l’adaptation des forces maintenant l’équilibre doit être rapide et proportionnée et dépend d’actions à la fois anticipatrices (anticipation, feed-forward) et réactives (rétroaction, feed-back). En conclusion, toute modification de la posture résulte de la somme des actions des forces (internes et externes) s’exerçant à chacun des étages segmentaires du corps humain. Le maintien de la position debout est un phénomène adaptatif et dynamique construit par apprentissage. Le maintien prolongé de la position debout, provoque la fatigue et impose au corps de ne pas être strictement immobile. En permanence, le corps est animé de petits mouvements d’oscillations antéropostérieures et de droite à gauche. Ces petits mouvements entraînent une variation de l’état de tension régnant au sein des structures actives (modification des activités musculaires) comme des structures passives (changement de leur course) qui assurent le maintien postural et son équilibre. Ces variations permettent de modifier les appuis utilisés pour stabiliser la posture tout comme leur intensité (forces d’appui, tensions actives et passives). Une interprétation fonctionnelle de ces changements d’appuis est qu’ils permettraient de prévenir ou de retarder l’apparition d’une fatigue tant mécanique (contraintes, déformation des structures et fluage) que physiologique par diminution de l’apport vasculaire (microcirculation) et de la trophicité (épuisement énergétique local). Il contribue aussi au repos des structures responsables du maintien postural. Les petits mouvements du corps en position debout peuvent être matérialisés par l’enregistrement des oscillations du centre des pressions sur une plateforme de force. Le centre des pressions est le point d’application des forces de réaction du sol liées à l’action du poids du corps. En position debout, les oscillations du CP sont réduites (surface de l’ordre de 2 cm2). En condition statique, il est habituel de considérer que le CG et le CP sont alignés, le centre de pression se situe alors, en théorie, exactement dans la direction de la ligne de charge. En réalité, le CP ne se situe pas au centre géométrique de la surface d’appui mais un peu en arrière et à droite de celui-ci (talon droit) et le CP « poursuit » constamment les déplacements du CG [2].
Remarque
La position de la ligne de charge est directement liée aux effets de la masse corporelle : l’effet du poids du corps et celui de l’inertie (l’effet de l’inertie est considéré comme négligeable en condition statique).
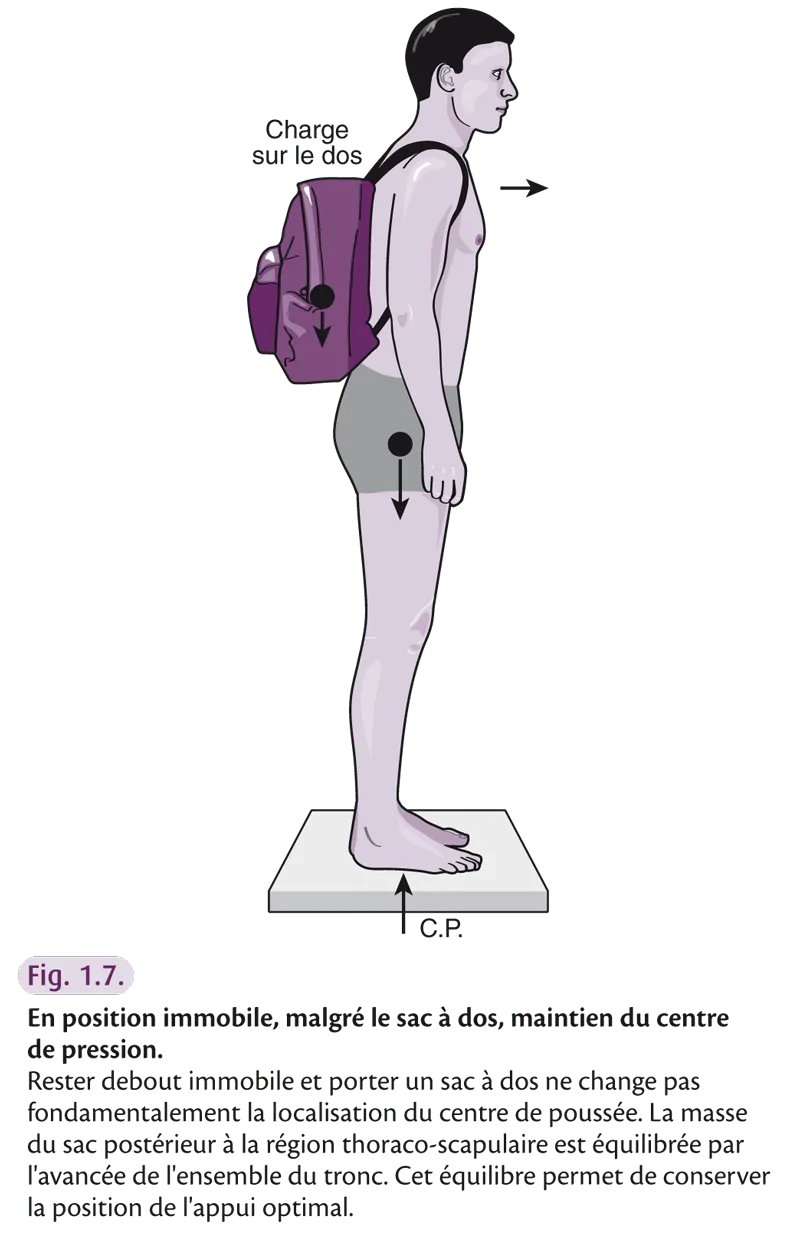
La localisation de la projection du CG au sol matérialisé par l’enregistrement du CP sur plateforme de force varie peu une fois la posture stabilisée, que ce soit en présence d’une charge extérieure surajoutée ou après avoir modifié le placement segmentaire. Pourtant, le port d’une charge supplémentaire, tel qu’un sac à dos, devrait se traduire par le déplacement du CG vers l’arrière. En fait, ce déplacement n’est que très limité et l’emplacement initial de la projection du CG au sol sans la charge est, après quelques instants, à peu près conservé. Ceci est vrai que la charge soit placée dans le dos au niveau thoracique ou sur toute autre région [28, 29]. L’ajout de cette charge supplémentaire est compensé par un réajustement du placement segmentaire qui permet de conserver la projection du CG au sol, parallèlement l’activité musculaire du maintien postural est ajustée en conséquence à chaque étage de la superposition des segments [27, 29] (figure 1.7). Ainsi, la position du CG comme celle du CP ne varient pas ou que très peu.
Lorsque la charge est située en arrière, le tronc est translaté vers l’avant. Ce déplacement est d’autant plus marqué que la charge est située plus bas. À l’inverse, lorsque la charge est en avant sur l’abdomen, le tronc est translaté vers l’arrière. En réalité, cette réaction prend un peu de temps (quelques dizaines de millisecondes, voire quelques secondes), en rapport avec l’aptitude de chacun à réagir et à stabiliser la posture (qualités proprioceptives, vitesse de réponse musculaire). Il s’agit d’une réaction automatique (feed-back ou rétroaction). De même, lorsque l’on effectue un mouvement segmentaire en position debout – étendre les membres supérieurs à l’horizontale vers l’avant par exemple – la projection du CG au sol ne varie pas non plus. Pourtant, le déplacement en haut et en avant de la masse des membres supérieurs devrait avoir pour effet de déplacer la projection du CG au sol vers l’avant, en proportion du déplacement de la masse des membres supérieurs. En réalité, il n’en est rien, le déplacement des membres supérieurs est compensé par un déplacement en sens opposé d’une autre partie du corps. Dans ce cas, ces réajustements segmentaires relèvent d’une stratégie anticipée (ajustements posturaux anticipés) qui ont aussi pour objectif de contrebalancer le déséquilibre de la posture créé par le mouvement lui-même au niveau segmentaire [30, 31] et ils permettent de conserver l’équilibre ainsi que l’emplacement de la projection du CG. En conclusion, toute modification de l’emplacement du CG en position debout (déplacement segmentaire, ajout d’une charge extérieure) correspond à un déséquilibre potentiel de la posture, celui-ci est compensé, par anticipation ou secondairement en réaction au déséquilibre, en modifiant les alignements segmentaires de telle manière que la projection du CG au sol soit conservée au même endroit. Le réalignement des segments permet de modifier la répartition des masses segmentaires et ainsi de conserver la projection du CG au sol à peu près au même endroit, ce qui permet de conserver la stabilité de la posture initiale. Cependant, il est parfois nécessaire de modifier la posture [19] ou la base d’appui (exécution d’un pas, réaction d’agrippement) pour conserver l’équilibre et ne pas chuter [32]. Les translations correspondent au mécanisme qui régit le déplacement des segments corporels observés en position debout. Le mouvement de translation permet de gérer les déplacements des segments corporels tout en stabilisant la projection du CG au sol, ce qui a pour effet de diminuer le déséquilibre créé par le mouvement. À quoi correspond un mouvement de translation en position debout ? Il s’agit d’un mouvement effectué dans un plan horizontal par un déplacement segmentaire effectué sans bouger les pieds. Par exemple, le mouvement de flexion antérieure du tronc, genoux tendus, correspond au recul du bassin, c’est-à-dire à une translation en arrière de la ceinture pelvienne, qui résulte d’une flexion des articulations de hanche et d’une extension simultanée de celles des chevilles. Un autre exemple de translation correspond au mouvement d’accroupissement au cours duquel la flexion du tronc est obtenue par flexion des genoux simultanément à celle des hanches et des chevilles sur place. Dans ce cas, la conséquence des translations est verticale, le CG descend mais il s’agit toujours de translation entre l’avant et l’arrière, en rapport avec l’avancée des genoux et le recul du bassin qui effectuent un déplacement en sens inverse. Dans le plan frontal, l’attitude hanchée correspond à une translation latérale pelvi-abdominale, équilibrée par un déplacement en sens opposé thoraco-scapulaire. Lors des mouvements du membre supérieur, la nécessité de procéder au déplacement des segments par translation est moins apparente du fait que la masse des membres supérieurs est plus faible (4,9 % du poids du corps pour un membre supérieur). Dans ce cas, le déplacement des membres supérieurs est équilibré par un déplacement (translation) de faible amplitude du reste du corps en sens opposé.
RemarqueLa translation correspond à un mouvement de type 3 : toute articulation peut bouger de trois façons différentes : ■ 1. le segment distal sur le proximal ; ■ 2. le segment proximal sur le segment distal ; ■ 3. les deux segments ensemble, ce qui entraîne une translation de l’articulation qui, en position debout, correspond à un déplacement horizontal en sens opposé aux déplacements segmentaires.
En conclusion, le maintien de la position debout spontanée doit faire face à deux exigences : être économe en limitant la dépense énergétique et peu fatigante en termes de durée. La première exigence est en rapport avec une activité musculaire modérée, sous la dépendance d’un contrôle automatisé (tonus postural géré par anticipation et en réaction à) et avec l’utilisation des structures passives de maintien (course externe). La seconde utilise l’alternance des appuis et est, aussi, vraisemblablement liée aux oscillations posturales qui limitent leur durée de mise en charge. Pour terminer, il apparaît que les déterminants de l’organisation posturale sont individuels, pour partie héréditaire et pour partie influencée par les activités socioculturelles et sportives, la dimension psychique individuelle est également un facteur d’influence.
Mesures cliniques de l’équilibre sagittal de la colonne vertébrale
L’équilibre du corps sur le sol doit donc s’organiser pour conserver sa ligne de gravité ou ligne de charge sur sa base d’appui. Il en est de même pour l’équilibre régional des segments corporels sur leur support respectif, en tenant compte de la masse segmentaire correspondante. La colonne vertébrale et la ceinture pelvienne servent de tuteur au tronc et reposent sur les coxo-fémorales. Son équilibre d’ensemble, celui de chacune des pièces qui le constitue, doit être stable et économique, en termes de sollicitations mécaniques comme d’activité musculaire de maintien et, en particulier, dans le plan sagittal. Dans le plan sagittal, les centres de masse élémentaire des étages rachidiens (déterminés par barycentrimètrie) sont alignés sur une ligne proche de la verticale [33], qui croise les zones de transition entre les courbures vertébrales sagittales et passe par le milieu du plateau sacré. Cette verticale se projette quelques millimètres en avant de la première vertèbre cervicale, se superpose au rachis cervical, passe en avant du rachis thoracique et en arrière du rachis lombal (en moyenne 36,8 mm en arrière de L3). La ligne de gravité de l’ensemble du corps (déterminée à partir de la localisation du centre des pressions sur une plateforme de force, synchronisée et corrélée avec un système de radiographies bi-planaires) passe en avant de la colonne vertébrale [34, 35], à une distance moyenne plus ou moins grande en fonction de l’âge (mesures effectuées par rapport au centre des vertèbres T4, T9, T12, L3 et S1, en position debout, bras et coudes en flexion, mains aux épaules pour faciliter l’accès radiologique du rachis). Chez les sujets plus jeunes, la ligne de gravité se situe en avant de la colonne thoracique puis se projette sur la colonne lombaire du fait d’une lordose lombaire plus marquée. Avec le vieillissement (> 60 ans), la ligne de gravité se trouve située plus en avant, du fait de l’accentuation de la cyphose thoracique et de l’avancée de C7 (position de C7 mesurée par rapport à S1). Pour autant, la ligne de gravité reste stable quel que soit l’âge des sujets [34] (figure 1.7).
Chez les sujets âgés, l’augmentation de la cyphose thoracique et l’avancée de C7 sont compensées par le recul de la ceinture pelvienne. Ce recul correspond à une diminution des distances respectives mesurées entre la verticale passant entre les talons et S1 et entre cette même verticale et la ligne bi-fémorale. Cette compensation est obtenue par une rétroversion pelvienne (ce qui correspond à une flexion lombale ou cyphose lombale), avec diminution de la pente sacrée et augmentation de l’inclinaison pelvienne vers l’arrière sur les têtes fémorales [34, 35]. Lorsque la rétroversion pelvienne n’est plus possible, la compensation fait appel à une flexion des genoux [35] pour reculer la ligne de gravité [36]. Au niveau vertébral, la vertèbre T9 est la seule dont le rapport à la ligne de gravité n’apparaît pas modifié avec l’âge, T4 se déplace en avant et s’en rapproche, alors que T12 et L3 se déplacent en arrière et s’en éloignent [35].
RemarqueLes compensations, qui sont décrites ici, soulignent le rôle joué par les mouvements de translation (évoqués plus haut) dans la régulation de l’équilibre de la posture debout. En effet : ■ parallèlement à l’augmentation de la cyphose thoracique et à l’avancée de C7, la ligne bi-fémorales et S1 reculent et s’éloignent de la ligne de gravité qui est en avant et dont la projection, elle, reste stable sur les pieds. L’augmentation des distances respectives entre ces repères (S1, ligne bi-fémorale) et la ligne de gravité est assez fortement corrélée avec le déplacement en avant de C7 par rapport à S1 (respectivement 0,76 et 0,62) ; ■ la mobilité de la région pelvienne autour des hanches apparaît donc comme une sorte de régulateur permettant de conserver l’emplacement de la projection de la ligne de gravité du corps [34].
La plupart des paramètres décrits ci-dessus sont mesurés en laboratoire avec un matériel sophistiqué et coûteux qui ne les rend pas cliniquement d’un accès facile (barycentimètrie pour Duval-Beaupère, radiographies bi-planaires et plateforme de force pour Schwab et Lafage, ainsi que logiciels de traitement et d’analyse des données). Cependant, l’équilibre sagittal du tronc et des membres inférieurs en position debout peut être évalué cliniquement en mesurant l’emplacement de repères caractéristiques de la position du tronc et de celle des membres inférieurs, par rapport à un fil à plomb passant par la malléole latérale prise comme axe des oscillations antéropostérieures du corps en position debout, puis en déterminant l’emplacement de ces points caractéristiques par rapport à un fil à plomb aligné sur l’emplacement (projection) du centre de gravité du corps déterminé par le calcul dit de la « balance de Lovett » [15] (figure 1.8). L’équilibre sagittal de la ceinture pelvienne prise comme base du tronc peut, ensuite, être précisé en mesurant l’inclinaison sagittale du bassin sur les têtes fémorales par la mesure de l’obliquité de la ligne joignant les épines iliaques postéro-supérieure et antéro-supérieure [37]. Une augmentation de l’inclinaison indique une antéversion du bassin et une extension ou lordose lombo-pelvienne À l’inverse, une diminution de l’obliquité indique une rétroversion.
Remarque
Attention, il ne faut pas confondre flexion de hanche (région) et flexion de la coxo-fémorale (articulation) : la hanche est un terme morphologique et régional incluant la région lombale et coxale. La flexion lombale et la flexion coxale réunie permettent une amplitude de flexion de 140°, alors que la seule mesure coxale exclut la région lombale et l’amplitude de flexion est alors de 100°. Les amplitudes ne sont pas les mêmes et les deux flexions à ces deux étages peuvent s’additionner ou se soustraire. Dans la rétroversion debout, il existe un mouvement inverse entre la coxo-fémorale et la colonne lombale. C’est ainsi que lorsque l’on parle uniquement du bassin en mouvement, on parle région de la hanche et non spécifiquement de telle ou telle articulation.
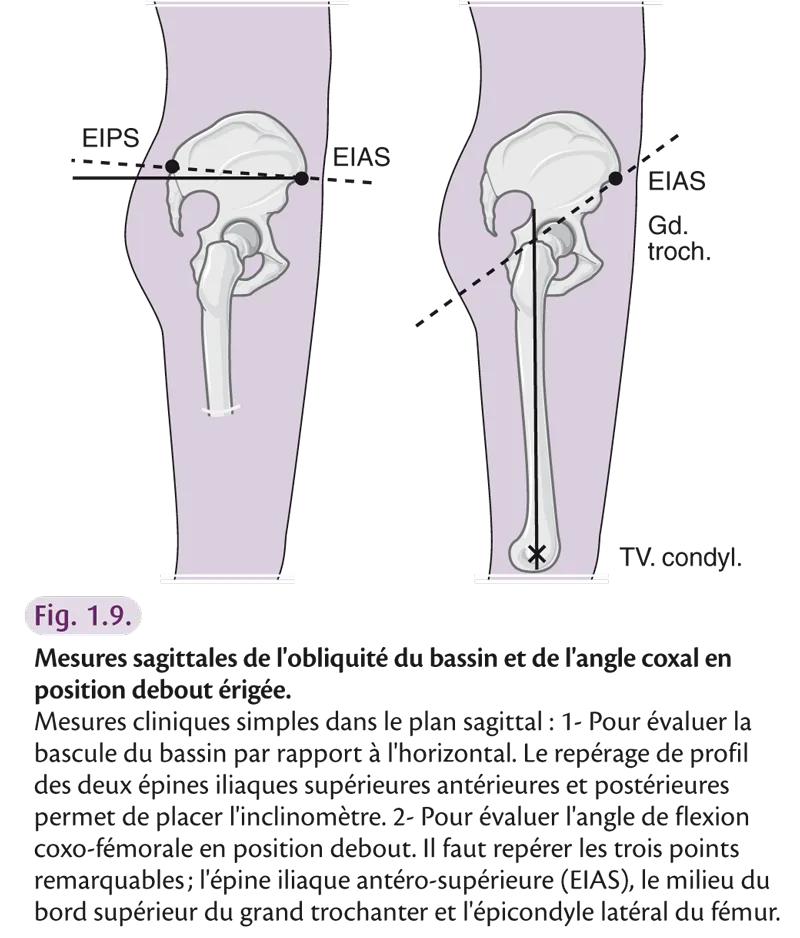
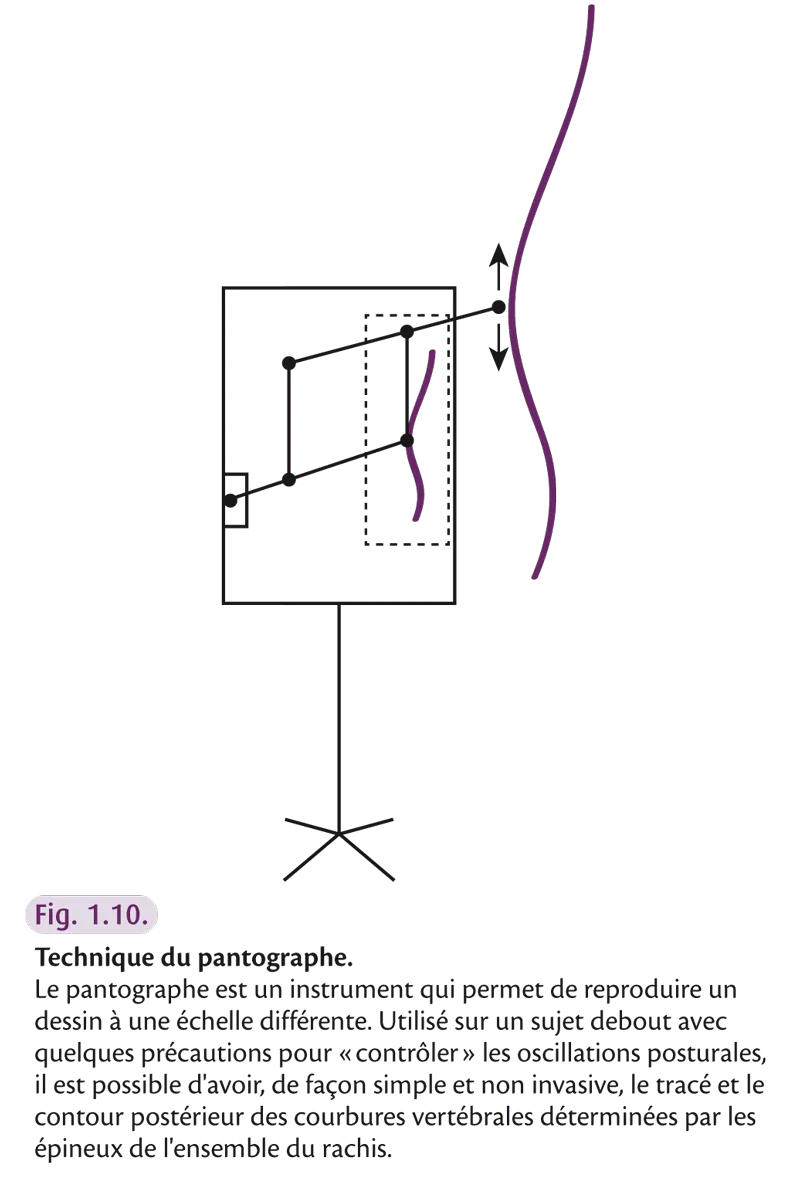
Cet examen est à compléter par la mesure de l’angle pelvi-fémoral dans le plan sagittal [38] (figure 1.9). L’angle pelvi-fémoral est formé par la droite joignant l’EIAS et le grand trochanter et la droite joignant le grand trochanter à l’épicondyle latéral du fémur. Sa mesure donne une idée de la position relative de flexion ou d’extension des articulations coxo-fémorales en position debout. L’équilibre sagittal de la colonne vertébrale, lui, peut être approché par l’utilisation d’un pantographe (le pantographe est un instrument comportant un parallélogramme articulé, utilisé pour reproduire le dessin des courbures vertébrales en modèle réduit) (figure 1.10).
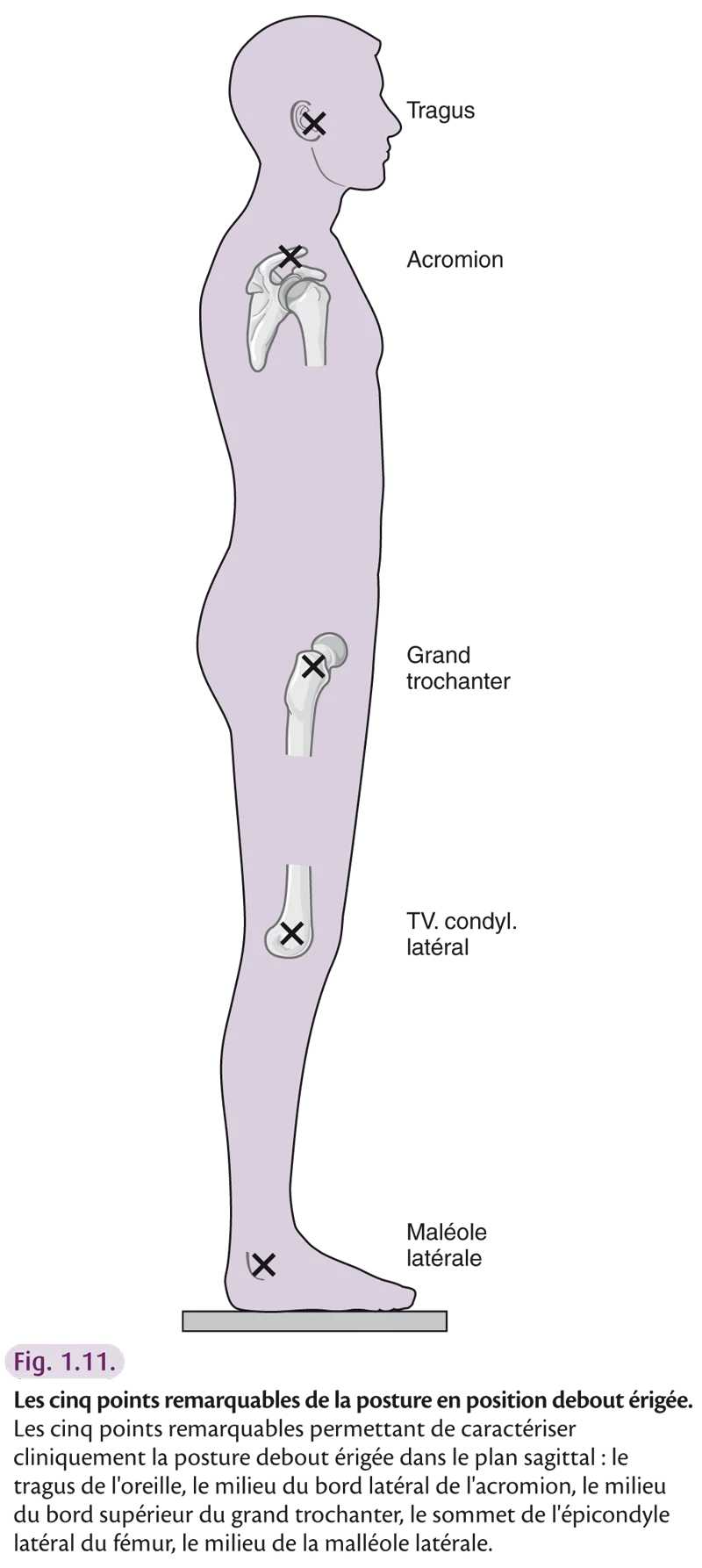
caractérisant la position du tronc et des membres inférieurs sont de bas en haut : ● la malléole latérale (axe des oscillations antéropostérieures du corps en position debout) ; ● l’épicondyle latéral du genou (axe de flexion extension du genou) ; ● le grand trochanter (situé un peu en dessous et en arrière des articulations coxo-fémorales) ; ● l’acromion permettant de situer la position globale du tronc et des épaules par rapport au pelvis ; ● le tragus de l’oreille permettant de situer la position de la tête et du cou par rapport au tronc.
La situation de ces points par rapport à la malléole latérale montre une posture globalement inclinée en avant. En position debout, le CG du corps est situé à environ 5 cm au-dessus du grand trochanter et donc en arrière des têtes fémorales. Les chevilles présentent environ 5° de flexion dorsale. Les repères caractérisant la position du tronc et des membres inférieurs par rapport à la verticale alignée sur l’emplacement du CG sont situés en avant pour le tragus (tête), en arrière pour l’acromion (haut du tronc), sur la verticale du CG pour le grand trochanter et donc en arrière des têtes fémorales (bassin), un peu en arrière pour l’épicondyle latéral du fémur (genou) et en arrière pour la malléole latérale [15] (figure 1.11).
La reconstitution en 3D (logiciel EOS) à partir de radiographies bi-planaires a permis récemment de situer les centres de masse des segments corporels par rapport à la ligne de gravité du corps dans son ensemble [39]. Cette étude vient à l’appui d’une partie des mesures cliniques, énoncées ci-dessus, et montre que, chez des sujets jeunes, les centres de masse de la tête, des cuisses, des jambes et des pieds sont tous situés en arrière de la ligne de gravité du corps, tandis que ceux de l’abdomen, de l’ensemble thorax, membres supérieurs et abdomen et du tronc sont situés en avant. La tête est celui des segments dont la position est la plus variable par rapport à la ligne de gravité mais sa position n’a pas de conséquence majeure sur le placement du tronc (incluant la tête) par rapport à la ligne de gravité du corps. Cette étude ne précise pas l’emplacement des articulations coxo-fémorales par rapport à la ligne de gravité de l’ensemble du corps. Par ailleurs, les repères suivants, conduit auditif externe, sommet du processus odontoïde, T1, T4, T9, L3, S1, genoux et chevilles, sont tous situés en arrière de la ligne bi-fémorale [40].
Remarque
■ La première étude d’Amabile [39] ne précise pas l’emplacement des coxo-fémorales par rapport à la ligne de gravité de l’ensemble du corps. Cependant, il a été constaté que la ligne de gravité du corps était située en arrière de la ligne bifémorale chez des sujets jeunes [34, 35] et, qu’avec l’âge et l’apparition d’une cyphose thoracique, la ligne de gravité de l’ensemble du corps tendait à se déplacer en avant pour se situer en avant de la ligne bi-fémorale. ■ D’autre part, à partir de mesures cliniques, Woodhull [16] rapporte que la ligne de gravité de l’ensemble du corps se situe en arrière des coxo-fémorales et que la verticale du centre de gravité partiel de la partie du corps située au-dessus des coxo-fémorales est située 1 cm (± 1,6) en arrière du grand trochanter et donc en arrière des coxo-fémorales. ■ Les résultats d’Amabile [40] laissent supposer que la ceinture pelvienne est translatée vers l’avant et est celui des segments du corps qui est le plus antérieur (plaçant la hanche en extension de manière à stabiliser la ceinture pelvienne de façon économique par la mise en tension des freins de l’extension de hanche). ■ Blondel rapporte, que par rapport aux chevilles et par rapport aux genoux, le reste du corps exerce un moment de flexion et que par rapport aux coxo-fémorales le tronc exerce un moment d’extension. Pour la colonne vertébrale, l’ensemble tête-cou exerce un moment de flexion sur la jonction cervico-thoracique, de même que l’ensemble tête-cou-thorax sur la jonction thoraco-lombaire et l’ensemble tête-cou-thorax-région lomboabdominale sur la jonction lombosacrée [41].
Rappel de mesures quantitatives
● Le pantographe (figure 1.10). Les résultats obtenus au pantographe montrent qu’il n’y a pas de différence significative homme/femme pour les flèches en C7 [flèche en C7 hommes (38,5 ± 17,6 mm), femmes (41,9 ± 15,9 mm)/ flèche en L5 hommes (19,2 ± 7,1 mm), femmes (27,9 ± 10 mm)] et qu’il y a une différence significative pour les flèches sommets des courbures dorsale et lombaire, et en L5/les sommets de courbure les plus fréquents sur la population totale sont : la moitié supérieure du rachis cervical, T6 en thoracique et L3 en lombaire, avec trois groupes distincts : – un groupe pour lequel le sommet de courbure dorsale est en arrière de la verticale passant par le sillon interfessier (62 % hommes, 17 % femmes) ; – un groupe pour lequel le sommet de courbure dorsale est en avant de la verticale passant par le sillon interfessier (22 % hommes, 74 % femmes) ; – un groupe pour lequel le sommet de courbure dorsale est à l’aplomb de la verticale passant par le sillon interfessier (16 % hommes, 9 % femmes). ● L’obliquité EIPS/EIAS (figure 1.9) : hommes 7,5°± 5,5, femmes 9,6° ± 5 ; pas de différence pour l’obliquité du segment cuisse par rapport à la verticale. ● L’angle pelvi-fémoral (figure 1.9) : debout hommes 138,7° ± 6,6, femmes 135,9° ± 6,4© 2018, Elsevier Masson SAS. Tous droits réservés
Références
[1] Massion J. Postural control system. Curr Opin Neurobiol 1994 ; 4 : 877–87. [2] Winter D. Human balance and posture control during standing and walking. Gait Posture 1995 ; 3 : 193–214. [3] Roll JP. From eye to foot : A proprioceptive chain involved in postural control. Posture and Gait. Amsterdam : Excerpta Medica ; 1988 : 155–64. [4] Vuillerme N, Nougier V, Prieur JM. Can vision compensate for a lower limbs muscular fatigue for controlling posture in humans ? Neurosci Lett 2001 ; 308 : 103–6. [5] Fitzpatrick R, McCloskey DI. Visual and vestibular thresholds for the perception of sway during standing in humans. J Physiol 1994 ; 478(Pt 1) : 173–86. [6] Kavounoudias A, Gilhodes JC, Roll R, et al. From balance regulation to body orientation : two goals for muscle proprioceptive information processing ? Exp Brain Res 1999 ; 124 : 80–8. [7] Dietz V, Gollhofer A, Kleiber M, et al. Regulation of bipedal stance : dependency on “load” receptors. Exp Brain Res 1992 ; 89 : 229–31. [8] Lysholm M, Ledin T, Odkvist LM, et al. Postural control–a comparison between patients with chronic anterior cruciate ligament insufficiency and healthy individuals. Scand J Med Sci Sports 1998 ; 8 : 432–8. [9] Kavounoudias A, Roll R, Roll JP. The plantar sole is a “dynamometric map” for human balance control. Neuroreport 1998 ; 9 : 3247–52. [10] Roll R, Kavounoudias A, Roll J-P. Cutaneous afferents from human plantar sole contribute to body posture awareness. Neuroreport 2002 ; 13 : 1957–61. [11] Bouisset S, Zattara M. A sequence of postural movements precedes voluntary movement. Neurosci Lett 1981 ; 22 : 263–70. [12] Do MC, Bouisset S, Moynot C. Are paraplegics handicapped in the execution of a manual task ? Ergonomics 1985 ; 28 : 1363–75. [13] Bouchot-Marchal B, et al. Les outils de mesure pour l’évaluation fonctionnelle du blessé médullaire. Recensement et intérêt pour la pratique clinique. Kinésithérapie Rev 2011 ; 19–32. [14] Brenière Y, Cuong Do M, Bouisset S. Are dynamic phenomena prior to stepping essential to walking ? J Mot Behav 1987 ; 19 : 62–76. [15] Péninou G. Examen de la posture érigée. Position relative de la ligne de gravité et de l’axe tragien. Ann Kinésithérapie 1982 ; 9 : 389–402. [16] Woodhull AM, Maltrud K, Mello BL. Alignment of the human body in standing. Eur J Appl Physiol 1985 ; 54 : 109–15. [17] Bouisset S. L’équilibre, la posture et le mouvement. In : Biomécanique et Physiologie Du Mouvement, pp 2002 ; 241–92. [18] Basmadjian JV, De Luca CJ. Posture. In : Muscles Alive. Their Function Revealed by Electromyography. Philadelphie : Lippincott Williams & Wilkins ; 1985 : 252–64. [19] Nashner LM. Fixed patterns of rapid postural responses among leg muscles during stance. Exp Brain Res 1977 ; 30 : 13–24. [20] Vuillerme N, Anziani B, Rougier P. Trunk extensor muscles fatigue affects undisturbed postural control in young healthy adults. Clin Biomech Bristol Avon 2007 ; 22 : 489–94. [21] Vuillerme N, Sporbert C, Pinsault N. Postural adaptation to unilateral hip muscle fatigue during human bipedal standing. Gait Posture 2009 ; 30 : 122–5. [22] Pinsault N, Vuillerme N. Vestibular and neck somatosensory weighting changes with trunk extensor muscle fatigue during quiet standing. Exp Brain Res 2010 ; 202 : 253–9. [23] Johansson H, Sjölander P, Sojka P. Receptors in the knee joint ligaments and their role in the biomechanics of the joint. Crit Rev Biomed Eng 1991 ; 18 : 341–68. [24] Solomonow M, Baratta R, Zhou BH, et al. The synergistic action of the anterior cruciate ligament and thigh muscles in maintaining joint stability. Am J Sports Med 1987 ; 15 : 207–13. [25] Lovett RW, Reynold ES. Method of determining the position of the center of gravity in its relation to certain bony landsmarks in erect position. Am J Physiology 1909. [26] Fick in Steindler A. the relation of the curves to the line of gravity. Kinesiology of the human body under normal and pathological conditions, fifth printing ; 1977. p. 127–9. [27] Okada M. An electromyographic estimation of the relative muscular load in different human postures. J Hum Ergol (Tokyo) 1972 ; 20 : 75–93. [28] Thomas DP. The effect of load carriage on normal standing in man. J Anat 1959 ; 93 : 75–86. [29] Carlsoo S. The static muscle load in differnet work positions : an electromyographic study. Ergonomics 1961 ; 4 : 193–211. [30] Bouisset S, Zattara M. Biomechanical study of the programming of anticipatory postural adjustments associated with voluntary movement. J Biomech 1987 ; 20 : 735–42. [31] Bouisset S. Relationship between postural support and intentional movement : biomechanical approach. Arch Int Physiol Biochim Biophys 1991 ; 99 : A77–92. [32] Maki BE, McIlroy WE. The role of limb movements in maintaining upright stance : the “change-in-support” strategy. Phys Ther 1997 ; 77 : 488–507. [33] Duval-Beaupère G, Robain G. Les rapports anatomiques du point d’application de la masse du segment corporel supporté par chaque étage vertébral. Ann Kinesither 1989 ; 16 : 1–7. [34] Schwab F, Lafage V, Boyce R, et al. Gravity line analysis in adult volunteers : age-related correlation with spinal parameters, pelvic parameters, and foot position. Spine 2006 ; 31 : E959–67. [35] Lafage V, Schwab F, Skalli W, et al. Standing balance and sagittal plane spinal deformity : analysis of spinopelvic and gravity line parameters. Spine 2008 ; 33 : 1572–8. [36] Lafage V, Schwab F, Patel A, et al. Pelvic tilt and truncal inclination : two key radiographic parameters in the setting of adults with spinal deformity. Spine 2009 ; 34 : E599–606. [37] Péninou G. Appréciation de la position sagittale du bassin. Ann Kinésithérapie 1987 ; 14 : 377–80. [38] Péninou G, Samuel J. Mesure des amplitudes en flexion-extension de l’articulation coxo-fémorale du sujet jeune. Ann Kinésithérapie 1984 ; 11 : 15–8. [39] Amabile C, Nérot A, Choisne J, et al. Alignment of centers of mass of body segments with the gravity line. Comput Methods Biomech Biomed Engin ; 2015. p. 1–2. [40] Amabile C, Pillet H, Lafage V, et al. A new quasi-invariant parameter characterizing the postural alignment of young asymptomatic adults. Eur Spine J Off Publ Eur Spine Soc Eur Spinal Deform Soc Eur Sect Cerv Spine Res Soc 2016 ; 25 : 3666–74. [41] Blondel B, Viehweger E, Moal B, et al. Postural spinal balance defined by net intersegmental moments : Results of a biomechanical approach and experimental errors measurement. World J Orthop 2015 ; 6 : 983–90.
Les Auteurs
Gilles Péninou Cadre de santé, docteur en biomécanique, enseignant Patrick Colné Cadre de santé en kinésithérapie, docteur en biomécanique et physiologie du mouvement, DU d’anatomie clinique et DIU rééducation des cérébrolésés
Vous venez de lire l’introduction de l’ouvrage La posture debout(S’ouvre dans une nouvelle fenêtre) de Gilles Péninou et Patrick Colné
La posture debout
Voir les articles de la rubrique Kiné/ostéo